
Voici le robot sur lequel je travaille avec un de mes collègue jusqu’à fin février.
Il est produit par la société Aldebaran-robotics sous le doux nom de NAO.
C’est le meilleur joueur de l’équipe de football « Les trois mousquetaires ». Ce robot est commercialisé et peut s’adapter à de multiples tâches, comme assister des personnes ou encore jouer au football.
Tous les moteurs sont à courant continu, avec un système d’asservissement pour bloquer les articulations. Mis à part deux légères différences (au niveau du poignet et des hanches).
Pour chaque articulation, on peut savoir exactement sa position grâce à un capteur à effet hall.
Ce robot est capable de voir en 3D. Pourquoi ? Il est équipé de deux caméras à capteur CMOS à la norme VGA. Il est capable de reconnaitre des formes, des visages et des logos.
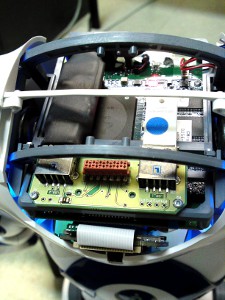
Il est aussi équipé de deux sonars à ultrasons (sur le torse) pour évaluer la distance qui le sépare d’un objet.
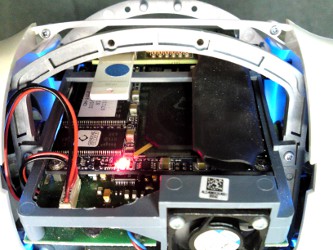
A l’intérieur, on trouve un processeur AMD Geode cadencé à 500 mghz, 256 MO de RAM et deux ports USB pour le stockage et le Wifi.
Il est équipé aussi d’une liaison Ethernet.
C’est un noyau Linux 2.6 temps réel avec un logiciel Naoqi qui gère les entrées/sorties et les différentes exécutions.
Pour découvrir les caractéristiques complètes.
Coté programmation, plusieurs modules et SDK sont disponibles :
- Pour le langage python, scripts exécutables sur une machine distante ou en local.
- Pour du C++, des programmes compilés avec des modules complémentaires
- Le langage URBI, spécialement conçu pour la robotique. Très ressemblant au C++, on y trouve des notions de temps réel qui n’existent pas dans le C++.
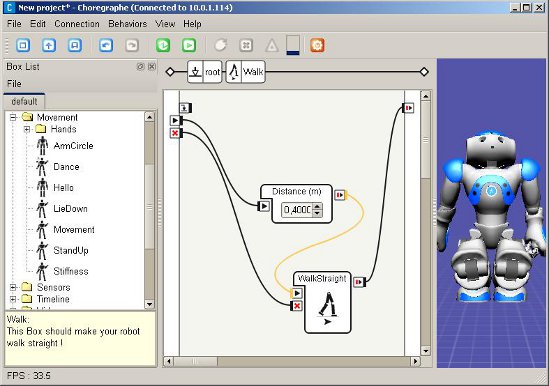
Aldebaran fournit le logiciel Choregraphe pour commander le robot de manière simple avec des mouvements prédéfinis :
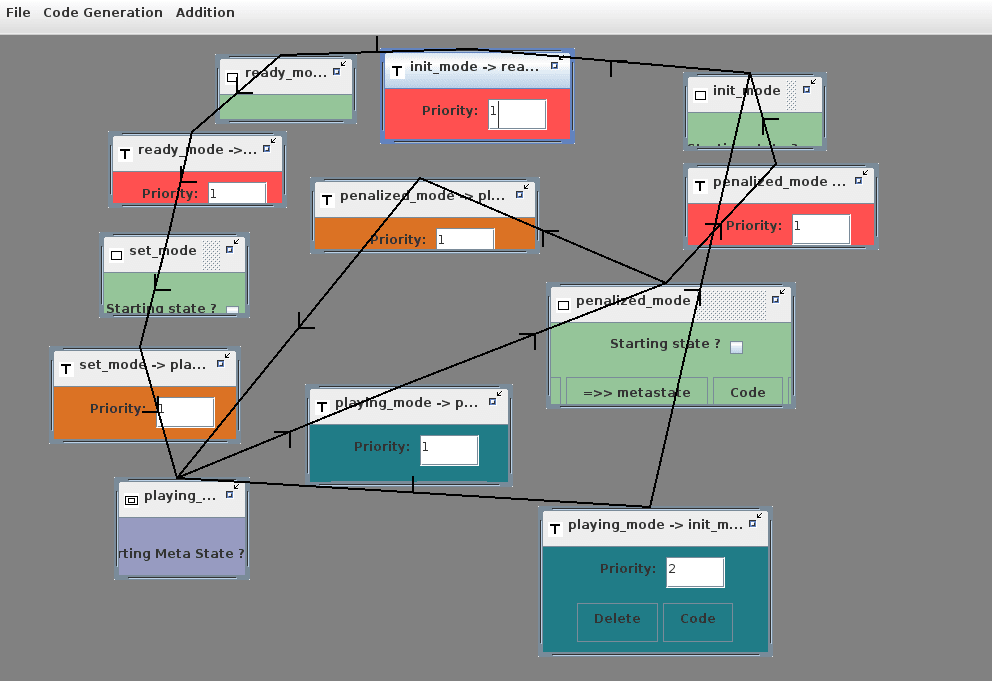
Un dernier logiciel (HFSM), spécialement développé au centre de recherche permet de mettre au point des comportements complexes. Par l’intermédiaire d’états et de transitions, pour chacune on tape le code C++ associé. Enfin, le logiciel est capable de générer tout le code avec les importations et les noms des méthodes appropriés.
Le principal avantage réside dans le fait que nous avons directement un visuel du comportement et nous n’avons pas à gérer des fichiers sources de plusieurs milliers de lignes.
Voila un article qui va sûrement plaire à mon ami Patrice, passionné de robotique… (Nicolas C.)

Bonjour
Tu l’as fabriquer ?
Si tu l’as fabriquer ou tu as acheter toute les pièces de NAO(moteurs,capteurs,etc…).
bonjour ou a tu acheter le plastique de nao
bonjour,
Notre petit projet sur ce robot est presque fini. Je ferai une présentation de notre travail avec une vidéo !
Bonjour,
Sympa cette présentation de Nao, j’espères que d’autres articles suivront avec d’autres photos, voir des vidéos! 😉